
Week of 12/8 - 12/12
- Dec 12, 2025
- 2 min read
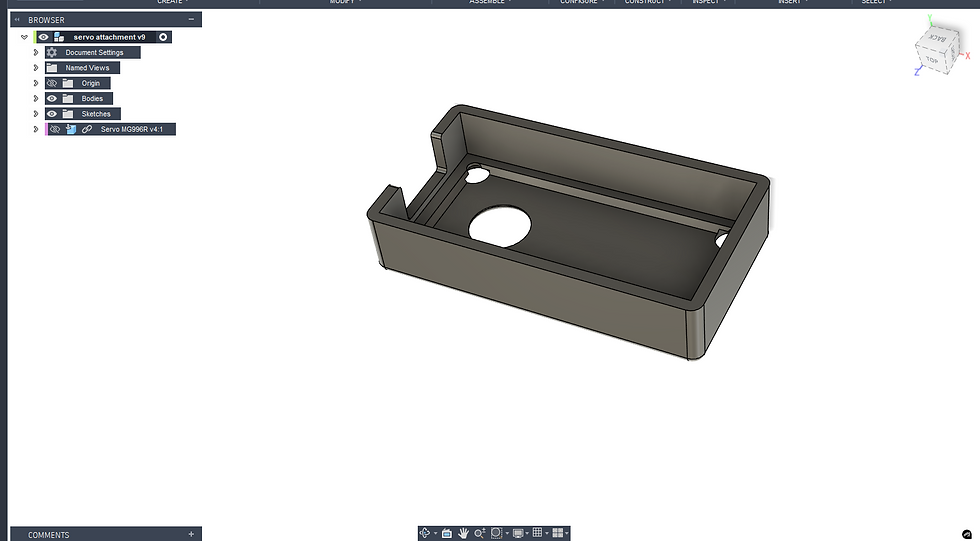
This week, I got a lot done on my leg design, as well as assembling and testing my leg. Firstly, I wanted to redesign a couple of parts since I didn't really like how I made them before. So I spent some time redesigning my foot part of the leg so that the holes were more evenly spaced and there wasn't any weird geometry going on. I also had to change a couple of sizes to make the motor fit better, and I removed one part that made it so the wire wouldn't fit. When I printed it, it worked perfectly.

I got the new motors in this week as well. So I was able to take the new measurements from those and redesign some of the parts I needed to. I needed to redesign the bottom bracket part that would attach to the other side of the motor. So had another connection point, and I needed to make it so that the screws could fit without having to go too far in. So I made a little divot at the end since the actual end of the motor is not fully straight, but rather has a bevel.
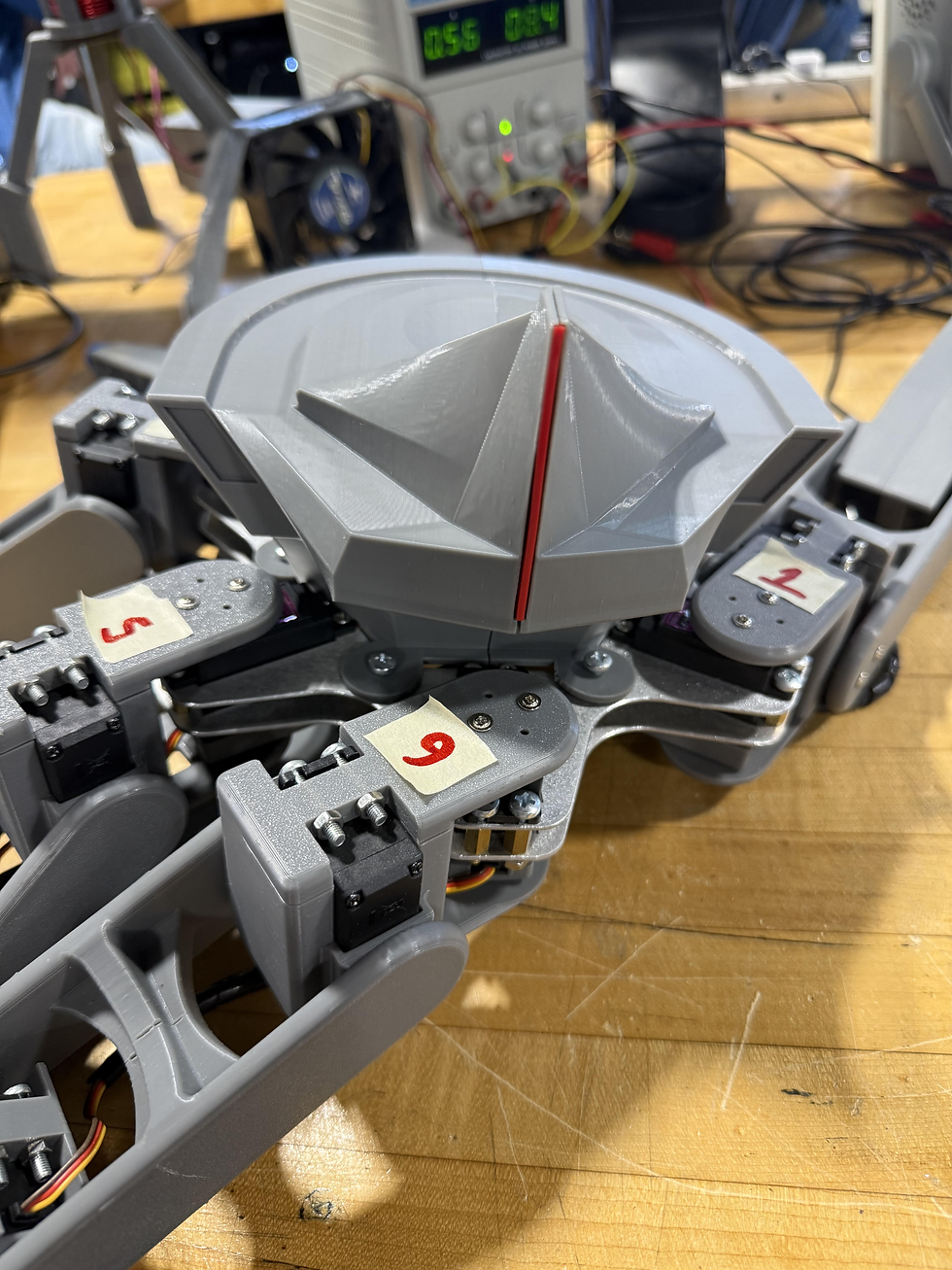
I then printed and assembled all the pieces, which took a little bit of time since there were a lot of screws I had to put in, but it didn't take too long. Eventually, I got the full thing assembled, and I wanted to test it out with the servo controller, so I needed to find the libraries for that. I looked at a guide online, and I installed an IDE that would allow me to send code to the Raspberry Pi microcontroller.

The servo controller also came with a few libraries, or at least a link to those libraries, and I copied one of them and started looking at an example near the end of class, and when I tested it with my motors, it actually worked very well. And I think there are some things I want to change with the design. But I'm mostly happy, and I want to start working on the code first.

I sadly don't have a video of the leg working, but since there's no space left on Wix, I was able to modify the code to make it work individually on each server. Starting next week, I should be able to work on implementing kinematics equations into the code and try to make a program where I can input any point and have the leg move to that point. I also need to cut out the frame, but I do not know when the water jet will be fixed.



Comments