
Week of 1/20 - 1/23
- Jan 23
- 1 min read
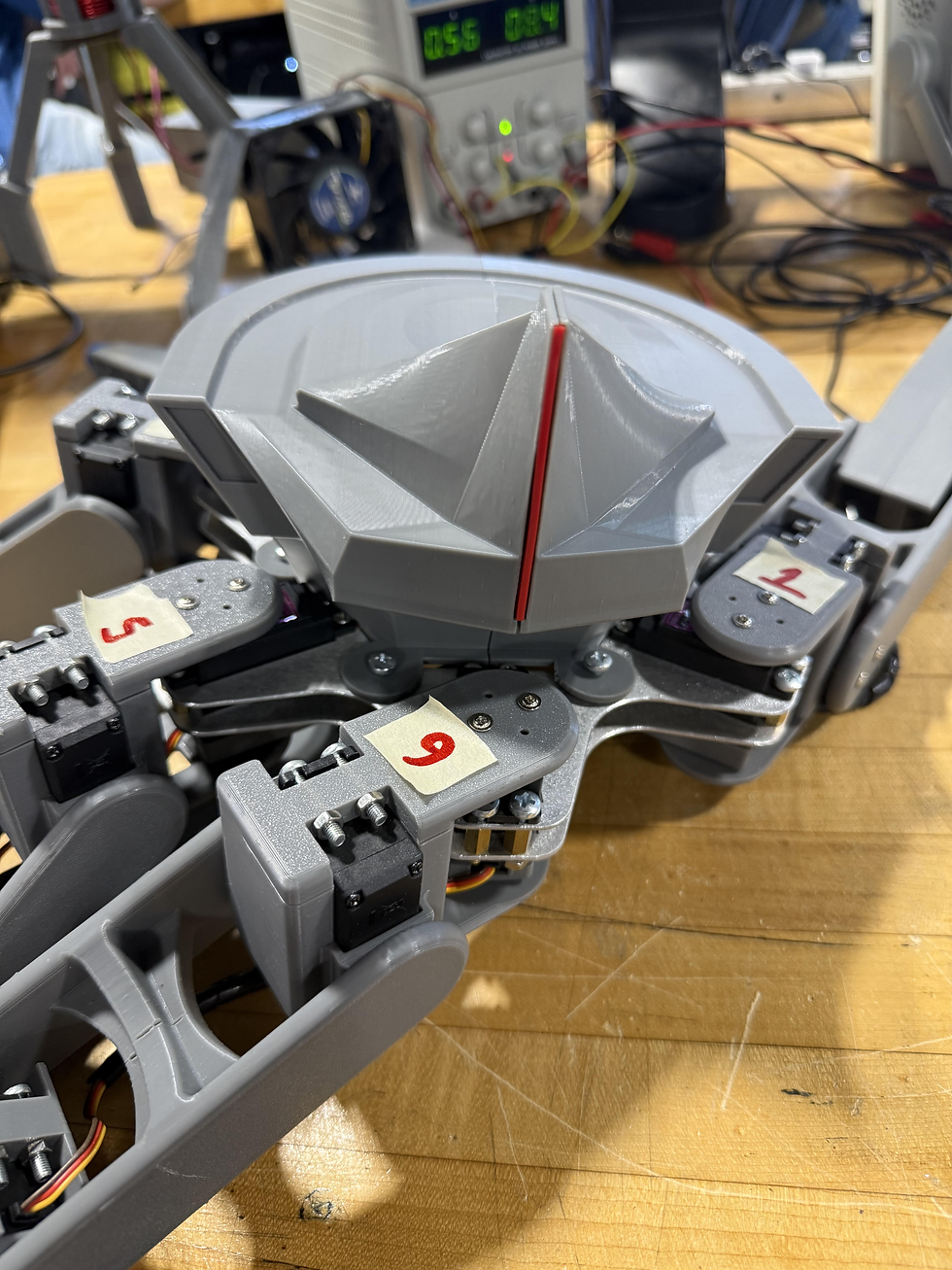
This week I began by making my hexapod work with four legs, and I wanted to get it to work with all of them at the same time. I had been powering it with a USBC coord, but it was only able to accept 3A from there, and it was not enough to drive all 12 motors at once. I then connected external power and it was able to move with all 4 at the same time. I then started working on making a walking patter, but because I only have 4 legs it is a lot harder since there is not enough stability to walk on its own, so I want to get all the legs on before finalizing it.

The 3d printer was being used though, so I turned my attention to the absolute mess of wires I was dealing with. I am going to have 3 wires per leg, so that's 18 in total and I want them to be neater, for looks and also so that none of the wires get tangled up. I started to solder the wires, since I had been using jumper wires to connect the wires that couldn't reach to microcontroller. I then wrapped up the wires together, and although I dont have a picture, it already looks a lot better.



Comments