
Week of 4/13 - 4/17
- Apr 16
- 2 min read
This week, I finally got all eighteen of the servo motors working with the new function, which is a big step in getting the robot to be complete. I did run into a few issues, though, especially with calibration and making sure that the servo cluster function actually worked as intended, since it was going from -1 to 1 instead of the previous 0 to 1 values I had before.

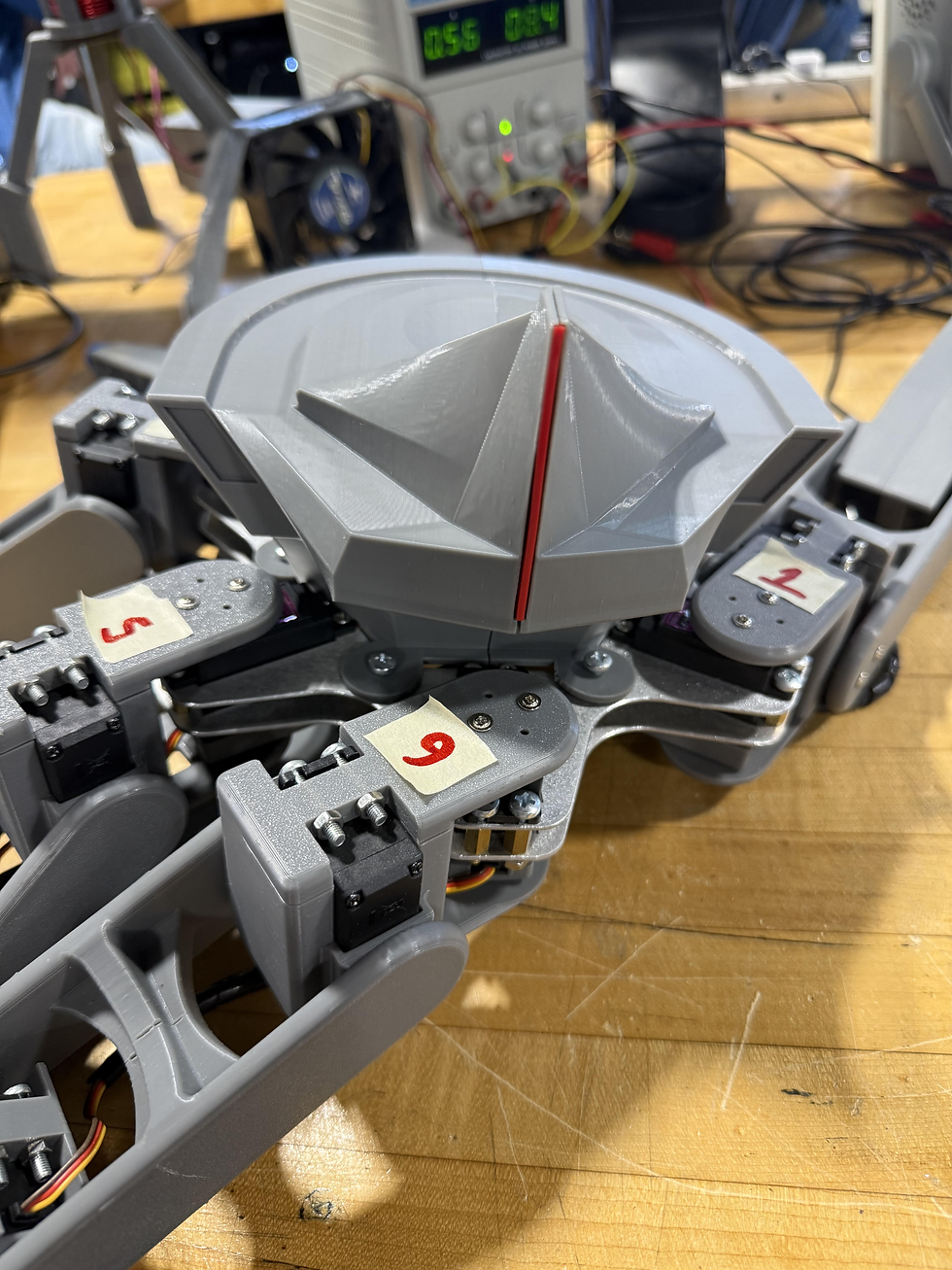
When I attached the motors to the 3D print, I had a bit of an issue since the servo horns had these gears on the inside, and those made it so that I couldn't choose exactly the angle I wanted. It led to some of the servos having an offset that made it so they weren't perfectly straightly attached, and I needed to fix that somehow. I realized I could just have a permanent offset to the motors that needed it, which would just change the degrees by a certain angle after it was changed to the right angle.

I then tested what angle I would need for each motor and recorded them all down so that I could use them in the future when I wanted to make it stand perfectly straight. This is actually a pretty big issue, and the difference is very apparent when looking at it. One issue I did have, though, is that the motors will bend no matter what, since when you place weight on them, they don't stay perfectly still.
I'm glad I got this working, though, because the difference is very apparent and makes it look a lot cleaner and balance much nicer. After that, though, I started working on a tripod gate, which will have three legs moving at first, then be placed down, then have the next three be placed, skipping every other leg.

I first started getting it working using just angles, and then I worked towards implementing inverse kinematics, but it wasn't too hard since I already had some inverse kinematics code. I just had to replace some aspects of it to get it to work. Eventually, I did get it to work mostly, but I still need to figure a few things out and then get the legs to actually move rather than just go up and down.


Comments